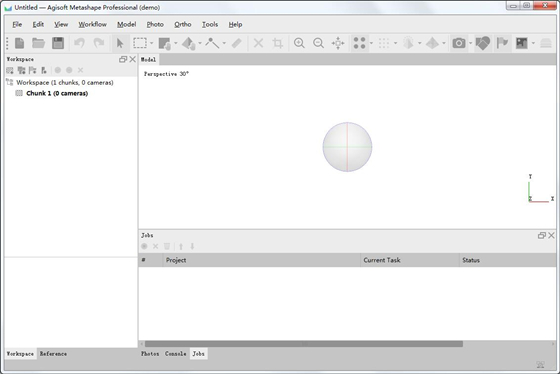
Agisoft Metashape专业版是一款强大的3D建模软件,它就是原来的PhotoScan,能够基于图像自动生成对应的3D模型,适用于建筑和地图等各种类型的图像,非常适合建筑设计和测绘人员使用,有需要的用户敬请下载。
摄影照片数据处理
Agisoft Metashape支持将导入的照片(通常是多角度的一组照片)进行处理,提取图像信息,转化成数据云(点云)。
注意:将2D图像转换为3D模型的过程需要每个帧之间的共同点以将它们连接在一起。故拍摄时要保证前一张与后一张的视觉变化不能太大,保证上下有较多的相同参考信息(可以先拍视频,再将视频里的每一帧导出)。
点云编辑、分类与自动校准
Agisoft Metashape支持将生成的点云数据进行精心的编辑排布,对点信息分类和几何重建(期间可能需要通过导入CSV格式的高程DTM数据),保存的文件格式为.LAS。
生成DSM/DTM
Agisoft Metashape可根据投影计算生成DSM(数字表面)/DTM(数字地形)模型。这些数据可来源于EXIF(自带数据信息的JEPG格式图片)照片的元数据、GPS或者人为给定的控制点数据。
当然,也支持GIS兼容的GeoTIFF格式和谷歌地球的.KML文件(这些都可以导出为excel)。同时校正地形纹理的色彩。
甚至还可以利用谷歌地球照片直接生成相应3D模型,完爆了一众建模软件。
生成的模型可以导出为.obj格式,用于3ds Max、Maya、C4D等3D软件。之后再转换为SU或者软件使用都是可以的,但要花些功夫就是了。
测量距离,面积,体积
Agisoft Metashape内置工具可以测距,测面积、体积。对于更复杂的测量分析,该软件可以顺利的导出到外部工具,因为它支持多样的输出格式。
地面控制点:高精度测量
Agisoft Metashape可以导入GCP以控制结果的准确性。编码/非编码目标自动检测快速GCP输入。比例尺工具设置参考距离而无需实现定位设备。
生成3D模型纹理
Agisoft Metashape可自动生成各种真实场景和材质:考古遗址,文物,建筑物,室内设计,人物等。可导出流行格式。逼真的纹理支持HDR和多种格式文件。
动态场景的4D建模
Agisoft Metashape可用于电影艺术,游戏产业等创意项目的多摄像机的数据处理。基于时间序列重建3D模型的众多视觉效果。
全景拼接
如果存在至少2个摄像机,Agisoft Metashape可以从两个摄像机捕获的数据进行3D重建。 图像数据可以实现360°全景拼接。
自带Python脚本
除了批处理的方法之外,Agisoft Metashape自带Python脚本还提供了自定义选项: 几个类似数据集的参数模板; 中间处理结果检验等等。有编程基础的设计师,没准还能自己写段代码改进软件功能。
其他应用
除上述摄影建模的主要功能之外,Agisoft Metashape还支持云处理,还可用于3D打印、样品采集分析、文物修复、遗迹展示、资料保存等应用,功能可以说相当强大。
导入照片,POS,准确性调整
1.如果您在EXIF标签中存储了位置精度:
转到“工具”菜单->“首选项…”->“高级”选项卡,然后选中“从XMP元数据加载相机位置精度”。
2.在Metashape中添加照片:“工作流程”->“添加照片…”。
3.如果是没有POS的照片:
导入相机位置。通过单击“参考”窗口中的“导入”按钮导入POS。确保为文件选择正确的列。如果文件包含角度数据,请选中“加载角度”复选框,然后选择右列。选择存储相机位置的坐标系。如果您有精度估算,也可以加载它们。
4.如果您的相机相对无人机机头存在旋转,则需要在“工具”->“相机校准…”下指定。在“GPS/INS偏移”标签下,将“偏转(度)”指定为90或您旋转的角度。
5.检查设置。单击“参考”窗口中的“设置”按钮。如果您使用的是方向数据,但尚未导入方向精度,则建议您在不确定是否具有比其更好的精度的情况下,将精度提高到10-20度。
照片质量
1.Metashape可以自动估计照片质量。
建议禁用质量值小于0.5个单位的图像,并将其排除在摄影测量处理之外。
2.通过在参考窗口中右键单击照片,选择“估计图像质量…”,然后选择“所有相机”,可以估计图像质量。
3.要显示照片的估计图像质量,请在“照片”窗格中将查看模式更改为“详细信息”。
4.您现在可以按“质量”列进行排序。选择质量低于0.5的照片并将其禁用。
对齐照片
1.对齐您的照片:“工作流程”->“对齐照片…”。将“精度”设置为“高”(只需要DOM、DSM、DEM,不需要高精度模型的时候,用“低”就完全够了),将“成对预选”设置为“参考”。您也可以使用“最高”,但是会花费更长的时间。阅读手册中的准确度等级是什么意思。可能有必要调整“关键点”和“联系点”限制,以加快处理速度。“自适应相机模型拟合”将使Metashape根据其可靠性估算值来选择应包含在调整中的相机参数。
2.对齐完成后,浏览照片,然后依次取消选中和禁用照片块。完成此操作后,运行“优化摄像机…”。勾选:f,cx,cy,k1,k2,k3,p1,p2。
3.在继续之前,请复制您的块。如果在以下步骤中出现问题,则可以返回到副本。
4.使用手动选择工具删除稀疏点云中明显的离群点。然后运行“优化相机…”(勾选:f,cx,cy,k1,k2,k3,p1,p2)。
5.使用“模型”菜单下的“逐步选择…”。向过滤器推荐一定的值是很困难的,最好的方法是遍历这些过滤器以实现误差很小的点云。指定的值应视为建议值,并且取决于数据的质量。使用以下过滤器:
图像计数。如果您的数据应该覆盖两张以上的照片(例如,打开的区域和清晰的区域),请使用此选项。然后,您可以使用图像计数=2,对于地面植被比较多的数据,请跳过这一步。使用与以前相同的参数运行“优化摄像机…”。
重建不确定性(几何形状)。使用滑块调整合适的值以选择不确定性高的点。推荐值:50到25。按OK,然后按键盘上的Delete删除点。使用与以前相同的参数运行“优化摄像机…”。重复至少2次。
投影精度(像素匹配误差)。使用滑块调整合适的值以选择不确定性高的点。推荐值:10到8。按OK,然后按键盘上的Delete删除点。使用与以前相同的参数运行“优化摄像机…”。重复此过滤器和优化过程至少2次。
选中所有参数后,“优化相机…”。
如果您有地面控制点(GCP),请先将其导入,然后再继续进行下一步(重新投影错误)。请参阅下文,了解如何导入GCP。
重投影误差(像素残留误差)。使用滑块调整合适的值以选择不确定性高的点。推荐值:1到0.5。按OK,然后通过按键盘上的Delete删除点。选中所有参数,运行“优化摄像机…”。重复至少2次。
地面控制点(GCP)
仅当您已采集地面控制点时才执行此步骤。
1.如果地面控制点(GCP)与图像位于不同的坐标系中,则现在需要在导入之前将项目转换为与GCP相同的坐标系。单击“参考”窗口中的“转换”按钮即可完成此操作。(新版本已经支持照片、地面控制点采用各自独立的坐标系)
2.通过单击“参考”窗口中的“导入”按钮导入GCP。
3.每个GCP(甚至照片)的精度可以通过三种不同的方式设置:
x,y和z的精度为0.1m:0.1。
x和y的精度为0.1m,z精度为0.5m:0.1/0.5。
x的精度为0.1m,y的精度为0.2m,z的精度为0.5m:0.1/0.2/0.5。
4.刺点。您可以右键单击GCP,然后选择“按选择过滤照片…”。您可以使用“向上翻页”和“向下翻页”键在照片之间切换。将每个标记至少放置在两张照片中。时常运行“优化相机…”以改善未放置标记的位置。
5.“优化相机…”。如果您的GCP精度很高,则应先取消选中所有照片,然后再单击“优化相机…”。确保已检查所有要使用的GCP,并且它们具有正确的精度设置。对于使用DJI无人驾驶飞机拍摄的照片,其海拔质量不佳,因此,在运行“优化相机…”并进行处理之前,应始终取消选中照片(至少适用于2018年之前的DJI无人机)。
6.完成上述步骤后,GCP中的误差应该很小(如果使用RTK GNSS接收器,则误差约为5-20厘米)。
密集点云和正射照片
1.现在,您可以执行以下命令来执行批处理脚本,也可以一个接一个地运行它们。
2.建立密集的云(如果不进行模型重建可以不进行这一步)。使用“高”质量(很少使用“超高”,因为它需要很长时间,并且通常照片的质量不高。请阅读手册中的更多内容)。将深度过滤设置为“轻微”。
3.构建网格(通常从稀疏云中生成)。
4.平滑网格(工具->网格->平滑网格)。
5.使用稀疏云中的网格创建正射照片。
6.例如,将正照片导出为tif。
 立即查看
立即查看1.9GB/国产软件
2021-01-04
 立即查看
立即查看102MB/国产软件
2021-12-09
 立即查看
立即查看397MB/国产软件
2021-08-10
 立即查看
立即查看727.34MB/国产软件
2021-01-16
 立即查看
立即查看249MB/国产软件
2021-12-06
 立即查看
立即查看242MB/国产软件
2021-09-27
 立即查看
立即查看4.78GB/国产软件
2021-12-21
 立即查看
立即查看1.86GB/国产软件
2021-02-03
 立即查看
立即查看3.19GB/国产软件
2021-02-15


Photoshop 2020破解版1.9GB / 2021-01-04
点击查看UPUPOO激活码领取软件77.98MB / 2021-02-06
点击查看Maya2021最新版1.86GB / 2021-02-03
点击查看Xshell7激活破解版88.18MB / 2021-01-14
点击查看RPG Maker MV全能修改器507KB / 2021-01-05
点击查看